仅供个人学习,如有侵权,请联系博主删除,谢谢
一.联系?
(1)由来:应对燃油车,监控排放,引入OBD,即OBD-I;但OBD-I百家争鸣,物理接口形式各异。
(2)改良:由于开发性和接口统一形式需要,进而改良OBD-I,形成OBD-II;物理接口统一,软件协议=通用+OEM各自定义,由SAE(美国汽车工程学会)定义并推出的标准,监控汽车尾气排放的需求。
(3)发展:车载电子设备功能变得复杂,引入了UDS(统一诊断服务),定义了服务格式和统一了接口接口的层次标准,UDS也使用OBD-II接口。
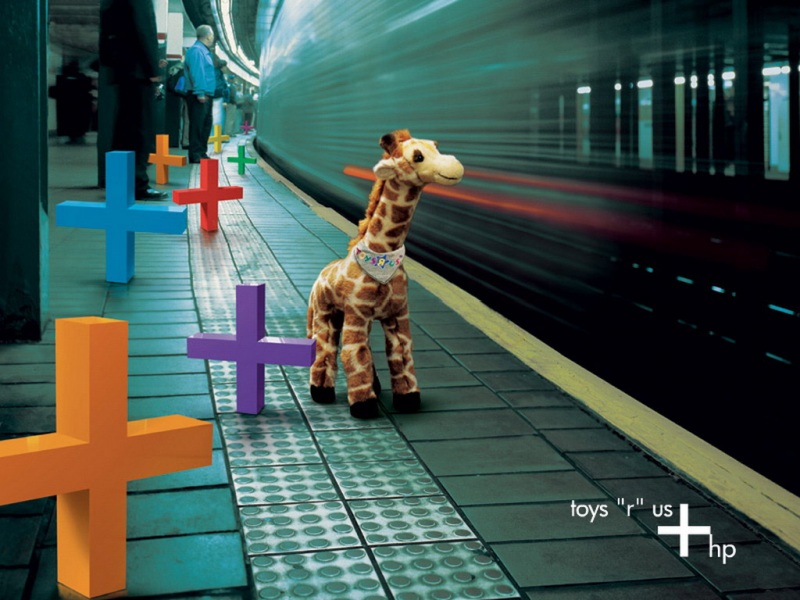
下图中,Vehicle manufacturer enhanced diagnostics(汽车制造商增强诊断)属于UDS分层OSI列,Legislated OBD属于OBD-II,Legislated WWH-OBD (全球统一车载诊断,标准化组织分配了ISO 27145(World-Wide Harmonized OBD)这个标准号来将OBD与UDS统一,使用UDS中的诊断服务来替代OBD相关的诊断服务。)
二. 区别?
(1)协议:OBD是排放相关的诊断内容,主要是ISO 15031-5协议,为法规强制要求燃油车满足的协议,燃油车必须满足(燃油车通常既满足UDS协议,又满足OBD协议,这两个协议不冲突),电动车是不需要满足的;UDS主要是14229-1协议,可以应用汽车上所有ECU。
(2)服务ID(SID):SID < 0x10,是OBD。用于车辆排放检测。SID >=0x10,是UDS。接口是 :诊断链接头(DLC)Data Link Connector 。UDS使用OBD-II接口。
(3)关注点:OBD是关注车辆实时排放的理念形成的行业规范,而UDS是诊断服务的统一化规范。
(4)适用范围:而OBD是面向排放系统ECU的,UDS是面向整车所有ECU(电控单元)的。
三. 总结
OBD和UDS两者之间并不存在谁替代谁。
四. OBD的9大模式操作介绍
为了能够快速的了解OBD的各个模式,以下针对每个模式从2方面进行介绍;
1).模式的作用(使用场景)
2),模式如何使用
a.模式1-请求动力系统当前数据
1).模式的作用
从这个定义我们就了解到,通过该模式我们可以去请求车辆上动力系统的一些数据,但是这些数据都是需要预先定义好的,如何进行定义呢,那么ISO标准规定了一些参数标识符即PID(parameter Identifiers),每个PID代表一个变量参数,但是呢在CAN上传输怎么去识别这个参数呢,其实就是顶一个8bit的数据来代表这个参数,比如PID 0x01 表示DTC清除后的监控状态,比如PID 0x05 表示电机冷却液的温度 ,那么ISO15031-5它定义了很多这样的PID参数,这样定义是很有意义的,因为这可以保证所有厂家的OBD可以尽可能的统一,从而方便通用。
我们稍微总结一下,模式1的作用就是 通过预先标准定义好的一些PID参数,去请求动力系统当前的一些数据(如速度、里程、温度等),以此来了解当前车辆的一些状态。
2).模式如何使用
ISO其实定义了很多PID参数,但是并不要求所有的主机厂把这些参数都实现,也就是说PID参数是可以选择支持的。那么我们怎么知道这个厂家支持哪一些参数呢?其实模式1中它有一些PID 0x00\0x20\0x40\0x60\0x80等就是用来查询到底支持哪些服务的。具体如何使用如下:
PID 0x00 用于查询(0x01~0x20)之间支持的PID参数
PID 0x20 用于查询(0x21~0x40)之间支持的PID参数
PID 0x40 用于查询 (0x41~0x60)之间支持的PID参数
以此类推后面的0x60 0x80
使用第一步:查询支持的PID参数(req表示请求(request),res表示答复(response))
req:01 00
res:41 00 xx xx xx xx
左起第一个xx表示0x01~0x08之间的PID支持情况 将xx转为2进制 如xx=0x65 ->xx=0110 0101 从左往右 那么表示支持PID 0x02 0x03 0x06 0x08
左起第二个xx表示0x09~0x10之间的PID支持情况 按照同样的转化方式
左起第三个xx表示0x11~0x18之间的PID 支持情况 按照同样的转化方式
左起第四个xx表示0x19~0x20之间的PID支持情况 按照同样的转化方式
是不是0x00就是查询0x01~0x20之间支持的PID情况?
同理对0x20 0x40等进行查询
使用第二步:就可以读取相关支持的PID参数的值了,假如支持PID 0x04 0x05 0x0d
req:01 04 05 0c
res:41 04 xx xx 05 xx 0d xx
其中xx表示支持的PID的值了,比如0d表示当前的车速,0d后面的xx的值是64,及对应的是100KM/h,即请求到的车速为当前100km/h
多说几句就是我们可以每次只请求一个PID,也可以一次请求多个,最多6个,而答复的话可能不会按照顺序来,如果在CAN上,答复的数据超过8个byte的话,那么它就会分出几个帧来进行答复。
b.模式2-请求冻结帧数据
1).模式的作用
首先解释一下冻结帧,所谓的冻结帧你可以理解为故障发生时刻的一些环境数据,冻结帧的存在就是为了尽可能了解故障发生时的一些参数,以此来方便分析故障。
因此我们可以这样说模式2的作用就是为了快速方便的了解,故障发生时刻的一个状态,以此来分析、排查以及定位故障,从而能够有效的提高售后维护的效率。
2).模式的使用
使用第一步:和模式1一样,先要查询支持的冻结帧的PID参数,格式也和模式1类似。
使用第二步:因为冻结帧是因为故障发生导致存储的,因此我们先要知道导致存储的冻结帧的故障码是什么。
req:02 02 xx //这里xx表示帧序号
res:42 0x xx xx xx //左起 第一个xx表示帧序号,第二个xx 表示DTC(故障码)高字节 第三个xx 表示DTC(故障码)低字节
使用第三步:请求相应的冻结帧数据,比如支持PID 0x0C(速度) 0x05(温度)参数 ,请求frame 00
req:02 0c 00 05 00 //这里00表示frame 00
res:43 0c 00 xx xx 05 00 xx 这里左起前两个xx表示速度 后面的xx表示温度
c.模式3-请求排放相关的故障码
1).模式的作用
首先我们了解一下故障码,所谓的故障码就是代表某一种故障的代码,比如氧气传感器短路的故障码为P0130 那么这些故障码在IDS15031-6中都有定义,对应can报文上两个字节DTC_H 和DTC_L 例如这里的P0130 对应的DTC_H = 0x01 DTC_L=0x30。
那么模式3的作用就是请求当前确认的故障(Comfirmed DTC)的故障码,以此就可以了解车辆发生故障时,是哪个故障导致的,进而就可以根据该故障的机理来分析故障,维修车辆。
2).模式的使用
req:03
res:43 03 01 41 01 45 01 48 // 03表示DTC的个数,后面三对颜色表示三个故障码P0141 P0145 P0148
如果没有故障则会回复 00 00…
d.模式4-清除排放相关的故障信息
1).模式的作用
为啥要清除故障信息呢,因为车子在出厂后,我们不能让车故障灯亮着就出厂吧,这是其一,其二就是每次维修好之后,有必要将故障清除掉,表示该故障已经解决,还有就是可以腾出内存空间,以便后续发生的故障进行存储。
2).模式的使用
该模式的使用比较简单;
req:04
res:44
就算没有故障,也会返回正响应;注意这里清除的数据比较多,包括故障码、冻结帧、测试数据等等排放相关的内存数据都会清除掉。
e.模式5-请求氧传感器的检测结果
1).模式的作用
显然根据名字我们就可以知道,这个模式的作用就是监控氧传感器的测试结果,因为氧气的浓度对燃烧过程有着重要的影响,因此对排放也有着重大的影响,因此有必要进行测试监控。一般支持模式6的话也可以通过模式6来代替模式5的功能。
2)模式的使用
使用第一步:查询支持的氧传感器支持的测试表示符TID(Test Identifiers),这是TID也在IDS15031-5的附录中有定义。如模式1和2查询PID一样,模式5查询TID也是类似使用0x00…来查询;
使用第二步:通过PID 0x13 0x1D来查询氧传感器的位置,因为动力系统模块中,可能多个地方都有O2传感器,如图定义了字节信息对应传感器的位置
使用第三步:查询氧传感器的测试结果,
根据第一步获得的TID 如0x05 和第二步获得的O2传感器位置0x01,那么就可以进行获取氧传感器的测试结果。
req:05 05 01
res:45 05 01 12 00 19 //这里的12表示测试结果,00表示测试结果范围的最小值,19表示测试结果范围的最大值。
f.模式6-请求指定监控系统的测试结果 1).模式的作用
车上不仅仅氧传感器的结果需要监控,还有其他很多的地方需要结构,比如催化剂、蒸发系统等等,那么可以通过模式6来进行监控。
那么主机厂也可以根据需要去定义监控各个系统模块ID以及需要进行测试的参数TID。
2).模式的使用
使用第一步:也是查询支持的TID
使用第二步:查询支持的组件ID(若有的话)
使用第三步:请求测试结果 比如 TID 0x11 模块ID 0x01
req:06 11
res:46 11 01 xx xx xx xx //左起前两个xx表示测试结果,后两个xx表示测试值的限制值,意思就是表示测试结果是否在范围内。
g.模式7-请求当前或上一驱动周期检测到的排放相关的故障码 1).模式的作用
为啥有了03请求故障码,还需要07模式呢,我们可以看到,03模式主要请求的是确认的故障码(比如一个故障发生后,需要连续3个驱动周期才能发展为确认的故障),而这里07模式表示的是当前的或上一驱动周期发生的故障(这里强调的是上一驱动周期或当前驱动周期发生的,意思是pending),以上是他们请求的故障码的区别。那么需要请求pending类的故障呢?这是因为,每次维修人员修理完之后,会清理故障,为了了解这个故障是不是真正解决了,就需要重新试一下,然后看这个故障是不是又会出现,如果是通过模式3去了解,则至少需要三个操作循环,而模式7则可当前操作循环就可以知道。
总结一下可以这么说07模式就是帮助技术员快速了解故障问题是否解决。
2)模式的使用
同03模式,可参考03模式。
h.模式8-请求控制在线系统或组件 1).模式的作用
因为这个模式使用的比较少,比如我国的所有OBD是不支持08模式的,以下对其进行简单的介绍。
这个模式就是通过定义测试标识符TID以及测试数据,去操作ECU进行测试。
2).模式的使用
如定义了TID 0x01 测试数据 00 00 00 00 00
req:08 01 00 00 00 00 00
res:48 01 00 00 00 00 00
i.模式9-请求整车信息 1)模式的作用
大家知道车辆中,有一个很重要的信息就是VIN码,也就是车辆标识码,这个码可是这辆车的“身份证”,那么我们怎么读这个身份证信息呢,这就需要我们使用09模式了。
此外还包括一些标定ID 标定校验ID ECU名称 IPT等信息可以通过09模式来读取。
2)模式的使用
和前面提到的PID TID一样,这里定义了一个叫InfoType的,你可以理解为消息类型,其实也同样是用一个byte来表示某个信息,比如infoType = 0x02表示VIN码这个信息。
使用第一步:类似查询支持的PID TID一样,这里第一步也是查询支持的InfoType;
使用第二步:根据支持的InfoType来请求其对应的值,如请求VIN码 0x02为例
req:09 02
res:49 02 32 31 47 53 78 98 27 18 38 38 85 92 92 82 71 82 92 //这里标红部分就是VIN的内容,如果是CAN的话会采用多帧传输,这里仅仅是示意。
以上主要针对OBD进行说明,更多具有价值的是读者去体会和使用其中提到的PID TID以及InfoType,经过几次使用之后会对这个协议会有更深的理解。
转载自:[1]/q1449516487/article/details/84990160?utm_medium=distribute.pc_relevant.none-task-blog-2defaultbaidujs_title~default-5.pc_relevant_default&spm=1001.2101.3001.4242.4&utm_relevant_index=8
[2]https://chilaidashi./article/details/107978450